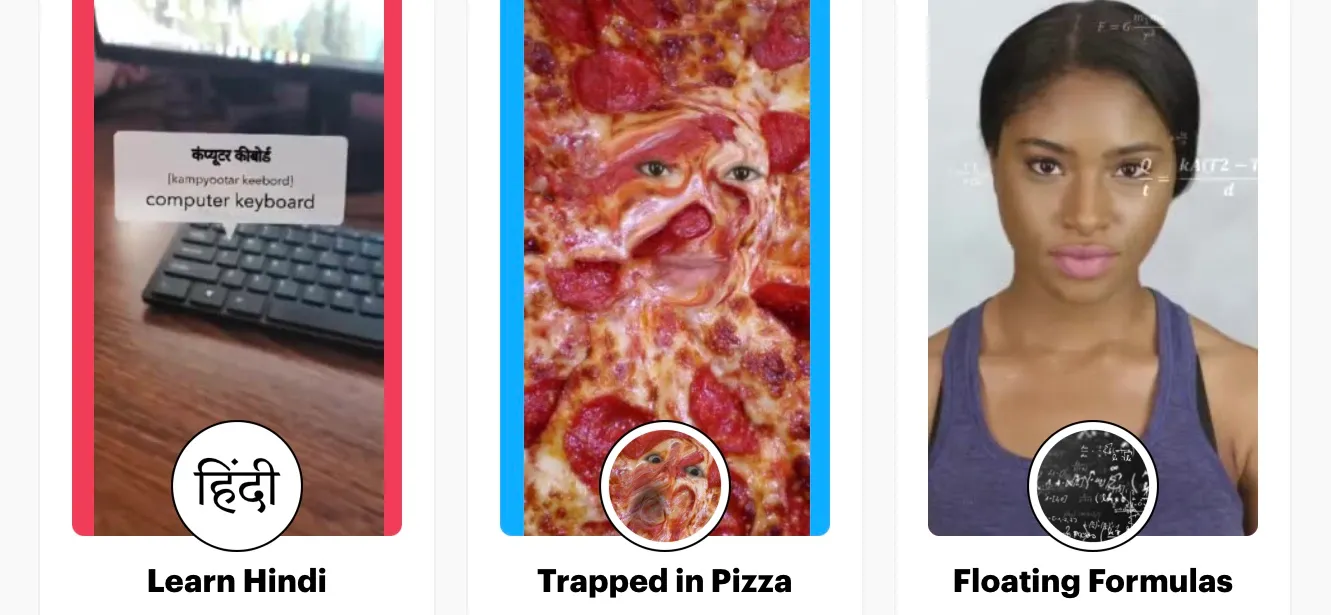
SnapML provides a way to utilize machine learning to build more immersive Snapchat AR Lenses. Style transfer is a computer vision technology that allows creators and developers to transfer any design from one source image to any targeted image.
Once our style transfer model is ready, we’ll upload and configure the converted ONNX/PB model file in Lens Studio, and from there, upload the resulting to our personal Snapchat app. And, then we can make it public so that others can use our lens.
Continue reading “Create a Style Transfer Snapchat Lens with SnapML’s ML Component”